Industrial robot programming
A 6-axis industrial robot from ABB is available for research  and education in the field of human-robot collaboration and robot interaction. It enables the practical learning of the robot programming language RAPID. It can also be controlled by external computers, for example via the Robot Operating System ROS. This enables the combination of this robot with many other technologies.
and education in the field of human-robot collaboration and robot interaction. It enables the practical learning of the robot programming language RAPID. It can also be controlled by external computers, for example via the Robot Operating System ROS. This enables the combination of this robot with many other technologies.
So far, students have developed a program that allows the robot to write a text on any surface with a pen.
Spherical Robots - Spherobs
The SpheRobs (Spherical Robots) project explores innovative computer 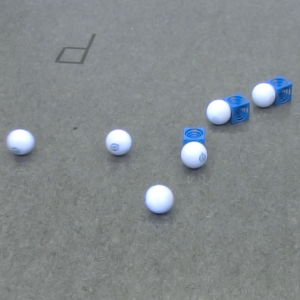 science approaches in the field of distributed robot systems. Spherical robots are ball shaped robots that are able to roll in any direction by shifting their center of gravity. Due to their simple principle they are well suited for use in research and education. Mainly approaches from the field of artificial intelligence, control engineering and image processing are applied to different scenarios. The objective is to bring algorithms well proven in simulations to real world applications. Especially the dynamic and unstructured human environment poses challenges to many robotic applications. So called spherical robots are used in the robotics lab to demonstrate the implemented approaches.
science approaches in the field of distributed robot systems. Spherical robots are ball shaped robots that are able to roll in any direction by shifting their center of gravity. Due to their simple principle they are well suited for use in research and education. Mainly approaches from the field of artificial intelligence, control engineering and image processing are applied to different scenarios. The objective is to bring algorithms well proven in simulations to real world applications. Especially the dynamic and unstructured human environment poses challenges to many robotic applications. So called spherical robots are used in the robotics lab to demonstrate the implemented approaches.
The following videos are available:
- Box pushing problem solved by spherical robot
- Collaborative box-pushing
- Position control with three spherical robots - Keeping a simple formation
- Control of spherical mobile robots under environmental disturbances
The following papers are available:
- Solving the box-pushing problem using a spherical robot
- Control of spherical mobile robots under environmental disturbances
Tic Tac Toe robot
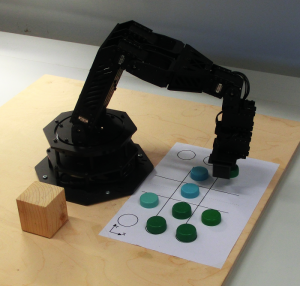
In the scope of several student projects was a Phantom X Reactor manipulator from Trossen Robotics programmed to play the well-known game “Tic Tac Toe”. The rob
ot can always play a perfect game as Tic Tac Toe is a game with complete information. The human player will never win against the robot, draw is the best achievable result. The following videos are available:
The software was implemented from students, the following topics were covered:
- Kinematics: Applying the Denavit-Hartenberg approach to model the robot
- Image processing: Detection of game situation with a webcam
- Artificial intelligence: Using the min-max approach to calculate the next move
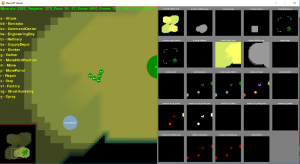
Software agents for Starcraft
An important topic in actual mobile robot research is the coordination of robot swarms and formations. Software agents are well suited to investigate a variety swarm algorithms. The "Applied Computer Science and Mathematics" group (Prof. Dr. Jörg Frochte) and the "Robotics and Computer Technology" group (Prof. Dr. Marco Schmidt) established a joint educational project to implement AI strategies for the real time strategy game Starcraft 2. The project is part of a bachelor curriculum course at Campus Velbert / Heiligenhaus. The development of the software agents is based on the Deepmind toolset (https://github.com/deepmind/pysc2)